
U-Boot mit Schallsteuerung

Unter Wasser ist eine Funkfernsteuerung kaum möglich. Daher wird hier an einer Steuerung durch jeweils zwei sich überlagernde Frequenzen gearbeitet, ein Frequenzpaar für die horizontale Richtung und eines für die vertikale.
Projekt in Arbeit (2026)

Fusion 360 3D-Modell
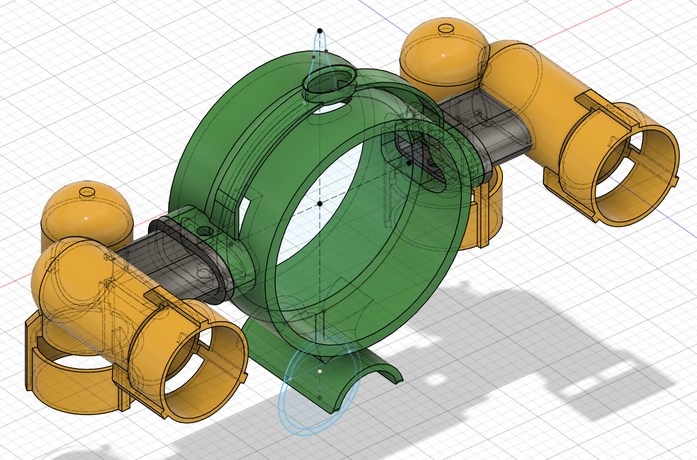
Triebwerke
Die Triebwerke bestehen aus jeweils zwei wasserdichten Bürstenmotoren zur horizontalen und vertikalen Steuerung
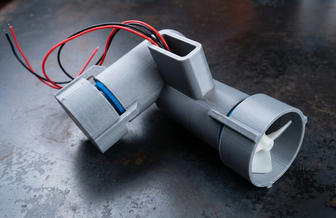
Exciter zur Erzeugung des Körperschalls


Exciter in wasserdichter Kabelanschlussdose.
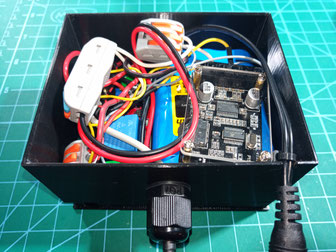
Bluetooth-Verstärker PCM1808 mit Verzögerungsschalter NE555 für Exciter (Kein DC-Klicken) und Lipo-Akku in gedrucktem Gehäuse.
Hydrophon


Die Schallaufnahme wird über einen Piezoschallwandler realisiert.
Ein JFET 2N5457 als Vorverstärker liefert den vom Piezo benötigten sehr hohen Eingangswiderstand.
Die Verstärkung wird dann über ein Modul GY-MAX4466 durchgeführt. Dafür wird das Electret Mikrofon des Moduls ausgelötet und stattdessen der JFET angeschlossen.
Parallel an den beiden Pins des Piezos wird noch ein 10 Megaohm Widerstand benötigt, um statische Aufladung zu verhindern und den Bassbereich zu definieren.
Audiospektrum Analyse und Steuerung mit ESP32 Modul
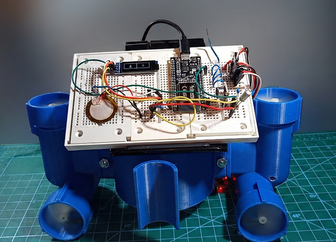
In diesem Schaltungsaufbau wurde der Piezo noch ohne das MAX4466 verwendet.
- Richtungsanzeige über OLED Display
- Motorsteuerung über drei 30A RC Geschwindigkeitsregler
- Spannungsversorgung des ESP32 über einen (!) der Motorregler Überspannungsschutz zum USB-Eingang über 1N5817 Schottky Diode!
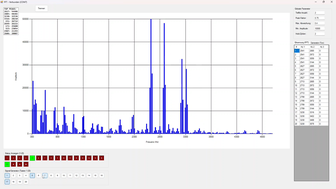
Anzeige der FFT-Analyse des ESP32 in einer C# Applikation:
Frequenzkombinationen für jeweils zwei Geschwindigkeiten
- Frequenzkombinationen 1-16 für horizontale Bewegungen
- Frequenzkombinationen 17-20 für vertikale Tauchbewegungen

.NET MAUI App auf Android-Smartphone:
- Bedienfelder für vertikale / horizontale Steuerung
- Erzeugung der Frequenzen
- Soundausgabe über Bluetooth an PCM1808 mit Exciter